

视觉引导用于公差叠加、光束直径和特征尺寸的组合会导致焊接不一致的情况。
精密激光焊接的挑战
当你制造医疗设备、汽车传感器和其他复杂的产品时,失败是不可选择的。由于精密公差和复杂的装配工艺,在生产环境中长时间持续激光焊接复杂部件是一项很难完成和维护的任务。
激光焊接应用的焦点直径通常为100-1000微米。接头在激光下的位置必须足够精确,以确保焦点不会丢失。
允许偏差是聚焦光束直径和接头设计的函数,通常在±75微米范围内。
对于许多应用,硬工具足以定位零件进行焊接。但是,在零件公差超过±75微米的应用中,需要对焊缝和/或激光点进行主动定位,以获得准确、一致的焊缝。
将视觉引导引入激光焊接
Invotec Engineering将视觉引导激光焊接系统集成到各种定制设备中,包括激光点焊机、缝焊机和激光加工中心,以解决医疗设备、汽车和国防工业的复杂焊接问题。
其工作原理如下:
视觉检测系统用于确定激光能量焦点相对于待焊接特征的位置。
一旦确定了偏移量,伺服定位系统就会移动终端光学元件或要焊接的零件,确保能量传递到正确的焊接位置。
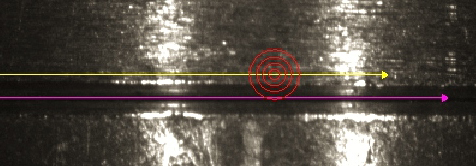
这些照片显示了视觉引导激光焊接相对于传统焊接的准确性。在第一张照片中,洋红色线是焊缝的位置。黄线是传统激光焊接系统放置焊缝的位置。这将产生一个被拒绝的部分。
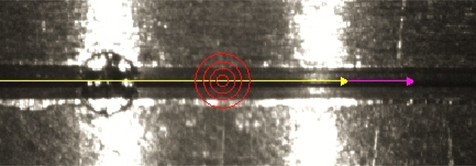
在第二张照片中,系统自动将激光路径与焊缝对齐。红色焊接目标现在正确地放置在焊缝上。每次结果都是一个批准的零件。
通过采用视觉引导激光焊接系统,我们的客户实现了以前手动焊接操作的自动化,提高了焊接质量和一致性,减少了废料,提高了生产能力。
共享此帖子